Title here
Summary here
Road Runner는 경로를 구성하기 위한 Path와 Trajectory 두 가지 데이터 구조를 제공합니다.
현재 Road Runner는 홀로노믹 드라이브(holonomic drive)를 위한 경로 추적(path following)을 기본 제공하지 않습니다.
대신, 탱크 드라이브(tank drive)를 위한 Ramsete 경로 추적을 포함하고 있습니다.
홀로노믹 드라이브를 지원하기 위해 벡터 필드 기반의 경로 추적 기능이 추가될 예정입니다.
자세한 내용은 FTC Discord를 참고하세요.
Road Runner는 PIDVA 기반의 Trajectory Followers를 홀로노믹 드라이브와 탱크 드라이브 모두에 대해 제공합니다. 이는 기본적으로 Quickstart에서 사용됩니다.
Vector와 Pose는 Road Runner에서 자주 사용되는 두 가지 주요 클래스입니다.
2D 벡터를 나타내며, X와 Y 좌표를 포함합니다.
// 좌표 (10, -5)에 벡터 생성
Vector2d myVector = new Vector2d(10, -5);2D 로봇 자세(Pose)를 나타내며, X, Y 좌표와 방향(Heading)을 포함합니다.
일반적으로 로봇의 위치와 방향을 나타냅니다.
방향은 삼각함수의 단위 원(Unit Circle)처럼 반시계 방향으로 증가합니다.
따라서 turn 함수는 반시계 방향으로 회전합니다.
각도는 라디안 단위로 표현되며, Math.toRadians()를 사용해 도(Degree)를 라디안으로 변환합니다.
// 좌표 (10, -5)에서 90도 방향을 향하는 포즈 생성
Pose2d myPose = new Pose2d(10, -5, Math.toRadians(90));아래 내용부터는 Road Runner Quickstart를 사용한다고 가정하도록 하겠습니다.
Quickstart를 사용하지 않더라도 기본적인 원리는 동일하며,
SampleMecanumDrive.java와 같은 헬퍼 함수는 무시하면 됩니다.
아래는 Trajectory를 생성하는 기본 예제입니다:
public class MyOpmode extends LinearOpMode {
@Override
public void runOpMode() {
SampleMecanumDrive drive = new SampleMecanumDrive(hardwareMap);
Trajectory myTrajectory = drive.trajectoryBuilder(new Pose2d())
.strafeRight(10)
.forward(5)
.build();
waitForStart();
if (isStopRequested()) return;
drive.followTrajectory(myTrajectory);
}
}SampleMecanumDrive drive = new SampleMecanumDrive(hardwareMap);SampleMecanumDrive 객체를 선언하고, OpMode의 hardwareMap을 전달합니다.
Trajectory myTrajectory = drive.trajectoryBuilder(new Pose2d())
.strafeRight(10)
.forward(5)
.build();trajectoryBuilder() 호출: drive 객체에서 호출되며, 기본 제약 조건(Constraints)을 전달합니다.new Pose2d()는 (0, 0, 0)의 기본값을 가집니다.(5, -4)로 설정하고 90도 방향을 향하도록 하려면 new Pose2d(5, -4, Math.toRadians(90))로 설정합니다..strafeRight(10)은 10인치 오른쪽으로 이동, .forward(5)는 5인치 앞으로 이동을 의미합니다.build() 호출: TrajectoryBuilder 객체를 Trajectory 객체로 변환합니다.waitForStart();
if (isStopRequested()) return;
drive.followTrajectory(myTrajectory);drive.followTrajectory(myTrajectory)는 생성된 경로(Trajectory)를 로봇이 따라가도록 명령합니다.
다음과 같은 Trajectory를 실행하려고 할 때:
drive.trajectoryBuilder(new Pose2d())
.strafeRight(10)
.forward(5)
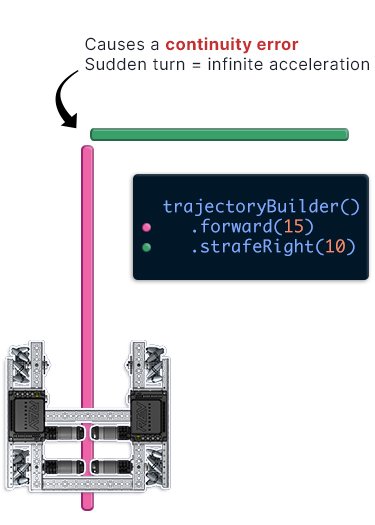
.build();프로그램이 충돌하며 PathContinuityException 오류가 발생할 수 있습니다.
이는 경로가 **연속적(continuous)**이지 않기 때문입니다.
모션 프로파일링 시스템에서는 경로가 연속적이어야 합니다. 불연속적인 경로는 물리적으로 실현 불가능하며, 순간적인 속도나 가속도의 급격한 변화가 필요하기 때문입니다.
문제 예시
아래 경로에서 로봇이 핑크색 선을 따라 이동하다가 오른쪽으로 순간적으로 방향을 바꾸는 것은 불가능합니다. 로봇은 여전히 위쪽으로의 관성(momentum)을 가지고 있기 때문에, 실제로는 호(arc)를 그리며 움직이게 됩니다.
Trajectory traj1 = drive.trajectoryBuilder(new Pose2d())
.strafeRight(10)
.build();
Trajectory traj2 = drive.trajectoryBuilder(traj1.end())
.forward(5)
.build();
drive.followTrajectory(traj1);
drive.followTrajectory(traj2);이 방법은 간단하지만, 각 Trajectory가 끝날 때 로봇이 멈추고 다시 시작해야 하므로 매끄럽지 않을 수 있습니다.
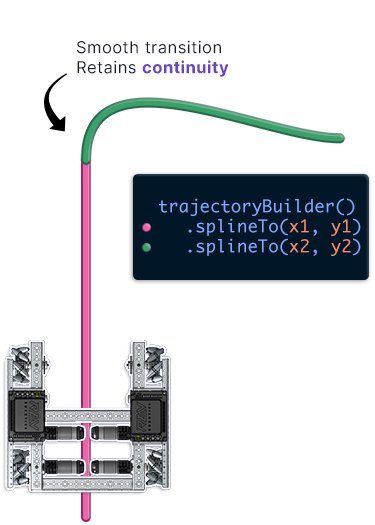
Trajectory traj = drive.trajectoryBuilder(new Pose2d())
.splineTo(new Vector2d(x1, y1), heading)
.splineTo(new Vector2d(x2, y2), heading)
.build();스플라인은 경로를 매끄럽게 이어주는 방법으로, 로봇이 자연스럽게 움직일 수 있도록 합니다. 스플라인 경로는 시뮬레이션 도구를 사용해 결과를 확인하는 것이 좋습니다.
경고
자신만의 Opmode를 실행하기 전에 반드시 이 작업을 수행하세요!
OpMode에서 Trajectory를 실행하기 전에, 로컬라이저(Localizer)의 위치가 모션 프로파일(Motion Profile)의 시작 위치와 일치해야 합니다.
기본적으로 로컬라이저의 위치는 x: 0, y: 0으로 설정됩니다.
하지만 사용자 정의 시작 Pose를 모션 프로파일에 정의한 경우,
로컬라이저의 위치가 일치하지 않아 이상한 움직임이 발생할 수 있습니다.
로봇이 예상치 못한 방향으로 움직이거나, 위치 PID 및 헤딩 PID가 이를 보정하려 시도하면서
비정상적인 동작을 보일 수 있습니다.
따라서 첫 번째 모션 프로파일의 시작 위치에 맞춰 drive.setPoseEstimate(new Pose2d())를 OpMode에 추가해야 합니다.
예시:
public void runOpMode() {
SampleMecanumDrive drive = new SampleMecanumDrive(hardwareMap);
// 로봇을 x: 10, y: -8, heading: 90도에서 시작하려고 합니다.
Pose2d startPose = new Pose2d(10, -8, Math.toRadians(90));
drive.setPoseEstimate(startPose);
Trajectory traj1 = drive.trajectoryBuilder(startPose)
.splineTo(new Vector2d(20, 9), Math.toRadians(45))
.build();
Trajectory traj2 = drive.trajectoryBuilder(traj1.end())
.splineTo(new Vector2d(20, 9), Math.toRadians(45))
.build();
drive.followTrajectory(traj1);
drive.followTrajectory(traj2);
}drive.setPoseEstimate()는 첫 번째 Trajectory를 실행하기 전에 한 번만 호출하면 됩니다.
로봇이 연속적인 경로를 따르도록 설정했더라도, 두 번째 Trajectory를 실행해야 할 경우가 있습니다. Trajectory는 연속적인 움직임을 나타내며, 로봇이 멈추거나 방향을 전환할 때 종료됩니다.
여러 Trajectory를 실행하는 방법:
Trajectory traj1 = drive.trajectoryBuilder(new Pose2d())
.strafeRight(10)
.build();
Trajectory traj2 = drive.trajectoryBuilder(traj1.end())
.splineTo(new Vector2d(5, 6), 0)
.splineTo(new Vector2d(9, -10), 0)
.build();
Trajectory traj3 = drive.trajectoryBuilder(traj2.end())
.splineTo(new Vector2d(5, 6), 0)
.splineTo(new Vector2d(9, -10), 0)
.build();
drive.followTrajectory(traj1);
robot.dropServo();
drive.followTrajectory(traj2);
drive.followTrajectory(traj3);중요 사항:
end() 값이어야 합니다.followTrajectory()를 호출하기 전에 모든 Trajectory를 미리 생성하세요. Trajectory 생성에는 약간의 시간이 소요되므로, 실시간으로 생성하면 경로 간에 약간의 지연이 발생할 수 있습니다.robot.dropServo()와 같은 함수는 Trajectory 실행 후 호출됩니다. 각 drive.followTrajectory() 함수는 동기적으로 실행되므로, 현재 Trajectory가 완료되기 전까지 다음 라인으로 진행되지 않습니다.SampleMecanumDrive.java 클래스는 turn() 함수를 지원하지만, 이 함수는 Road Runner의 핵심 기능이 아닙니다.
단순히 회전을 위한 모션 프로파일이며, Trajectory 내에서 호출할 수 없습니다.
drive.followTrajectory(traj1);
drive.turn(Math.toRadians(90));
drive.followTrajectory(traj2);
drive.turn(Math.toRadians(-270));로봇을 후진시키고 싶다면, TrajectoryBuilder에서 간단히 설정할 수 있습니다.
Trajectory trajectory = drive.trajectoryBuilder(new Pose2d(), true)
.splineTo(new Vector2d(36, 36), Math.toRadians(0))
.build();위의 true는 로봇이 경로를 후진으로 따르도록 설정합니다.
drive.turn() 호출 후 Trajectory를 실행할 경우,
이전 Trajectory의 end() 값이 현재 Pose와 일치하지 않을 수 있습니다.
이를 해결하려면, 적절한 회전을 Trajectory 시작 Pose에 추가해야 합니다.
Trajectory traj1 = drive.trajectoryBuilder(startPose, false)
.forward(10)
.build();
// 90도 회전을 traj1.end() Pose에 추가
Trajectory traj2 = drive.trajectoryBuilder(traj1.end().plus(new Pose2d(0, 0, Math.toRadians(90))), false)
.strafeLeft(10);
.build();
drive.followTrajectory(traj1);
drive.turn(Math.toRadians(90));
drive.followTrajectory(traj2);Trajectory의 특정 구간에서 속도를 줄이고 싶다면 다음과 같이 설정합니다:
.splineTo(
new Vector2d(30, 30), Math.toRadians(90),
SampleMecanumDrive.getVelocityConstraint(slowerVelocity, DriveConstants.MAX_ANG_VEL, DriveConstants.TRACK_WIDTH),
SampleMecanumDrive.getAccelerationConstraint(DriveConstants.MAX_ACCEL)
)FTC 좌표 시스템은 필드의 중심을 (0, 0)으로 설정합니다.
아래 이미지는 2019/20 Skystone 필드의 좌표 시스템을 보여줍니다.
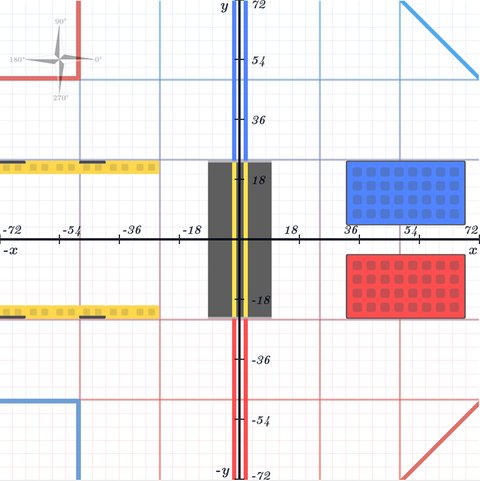
이 좌표 시스템의 명세는 여기에서 확인할 수 있습니다.