Title here
Summary here
경고
이 페이지는 특별한 목적이 있는 경우를 제외하고는 사용하지 않는 것이 좋습니다. 주행 속도 PID 조율 (Drive Velocity PID Tuning)은 로봇에서 사용하지 않는 것을 권장합니다. 대신 Feedforward 제어를 사용하세요.
주행 속도 PID 조율은 SDK의 내부 PID 컨트롤러를 사용하므로, 튜닝 과정이 매우 까다롭습니다. 이 방법으로도 좋은 결과를 얻을 수 있지만, Feedforward를 사용하는 것이 훨씬 더 간단하며 동일한 정확도를 얻을 수 있습니다. DriveVelocityControl은 특히 방향 및 팔로워 PID를 통합할 때 수정할 수 없는 진동을 유발할 수 있으며, 문제가 없더라도 튜닝에 더 많은 시간이 걸리는 경우가 많습니다.
경고
이 섹션은 엔코더를 사용하지 않도록 선택한 경우 생략해야 합니다.

현재 단계는 주행 피드포워드 조율 단계입니다.
속도 PID 튜닝은 Road Runner에서 가장 까다로운 작업 중 하나일 수 있습니다. 이는 정확한 경로 추적을 위해 필요합니다. 하지만 PID 컨트롤러의 작동 원리에 대한 직관과 수행 방법을 이해하면 이러한 좌절감을 완화하고 과정을 더 원활하게 진행할 수 있습니다.
팁
Program and Manage 메뉴에서 확인할 수 있습니다.192.168.49.1:8080/dash로 이동하세요.192.168.43.1:8080/dash로 이동하세요.MaxVelocityTuner 실행MaxVelocityTuner를 실행해 경험적 kF 값과 최대 속도를 측정합니다.MaxVelocityTuner는 지정된 RUNTIME 동안 최대 속도로 실행됩니다. 기본값은 2초입니다. 충분한 공간이 확보되었는지 확인하세요. RUNTIME은 코드나 Dashboard에서 조정할 수 있습니다.MaxVelocityTuner 결과 확인DriveConstants의 MAX_VEL로 설정하세요. 약간의 여유를 두기 위해 90-95% 값을 추천합니다.DriveConstants 드롭다운에서 MOTOR_VELO_PID를 열고 f 필드에 “Voltage Compensated kF” 값을 입력합니다.DriveVelocityPIDTuner 실행DISTANCE 값을 조정하세요.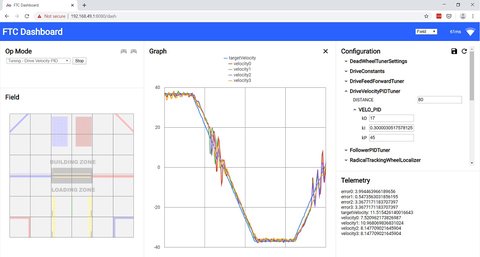
targetVelocity와 velocity0 체크박스를 활성화하세요.DISTANCE 조정targetVelocity 선이 평평한 구간(Plateau)을 가지도록 DISTANCE 값을 조정하세요.velocity0 그래프가 targetVelocity 선과 일치하도록 PIDF 값을 조정합니다.튜닝 절차
모든 PID 값을 0으로 설정하고, f는 MaxVelocityTuner에서 얻은 값으로 설정합니다.
velocity0이 targetVelocity의 꼭대기에 도달하도록 kF 값을 조정합니다.
p 값을 서서히 증가시켜 그래프의 경사(slope)가 targetVelocity와 일치하도록 합니다.
d 값을 소량 조정하여 진동을 줄입니다.
i 값은 사용하지 않는 것이 좋습니다. 필요하다면 f 값을 증가시키세요.
튜닝 후 Dashboard에서 설정한 값을 DriveConstants.java 파일에 복사하세요. Dashboard 설정은 임시로 저장되므로, 이를 잊지 마세요.
추가 팁
팁
Velocity PID 컨트롤러에서는 kD가 반드시 필요한 것은 아니지만, FTC 로봇에서는 피드포워드와 모터 컨트롤러 특성 때문에 유용할 수 있습니다.i 값을 사용하는 대신 f 값을 조정하는 것이 더 효과적입니다.
MaxVelocityTuner가 뒤로 움직이는 경우
속도 선 중 하나가 targetVelocity와 반대로 움직이는 경우
SampleMecanumDrive에서 인코더 값을 -1로 곱하세요.StraightTest 또는 DriveVelocityPID가 계속 과도하게 움직이고 DriveConstants.java 변수 조정이 효과가 없는 경우
DriveConstants.java에서 MAX_VEL 값을 낮춰보세요. 문제를 확인하기 위해 처음에는 아주 낮은 값으로 설정하세요.기타 모터 방향 문제
41번째 줄의 @Disabled를 제거한 후, opmode 주석에 따라 실행하세요.현재 이 웹사이트에서는 시뮬레이터를 직접적으로 지원하지 않습니다. 대신, 아래 버튼을 클릭하여 시뮬레이터를 이용해볼 수 있습니다.
튜닝 예제
팁
이 시뮬레이터는 매우 기본적인 수준의 “시뮬레이터"입니다.
kF 값은 매우 효과적이지만, 실제 로봇에서는 Rev Hub 모터 컨트롤러 특성 때문에 효과가 덜할 수 있습니다.추천 영상
PID 컨트롤러의 직관적인 이해를 돕는 몇 가지 좋은 영상입니다.
추가 읽기 자료
편집된 영상이 준비되기 전 임시로 제공되는 비디오입니다. 화질은 좋지 않지만 도움이 될 수 있습니다.