Title here
Summary here

현재 단계는 경로 폭 조율 단계입니다.
주의
트랙 너비를 조정하기 전에 로컬라이저의 방향 측정이 정확해야 합니다. 3-오도메트리 로컬라이저를 사용하는 경우, 측면 거리(lateral distance)를 먼저 조정하세요. 다른 경우에는 IMU를 통해 헤딩을 직접 얻어야 합니다.
노트
“경로 폭"라는 용어는 문맥에 따라 혼란을 줄 수 있으므로, 이를 명확히 설명합니다.
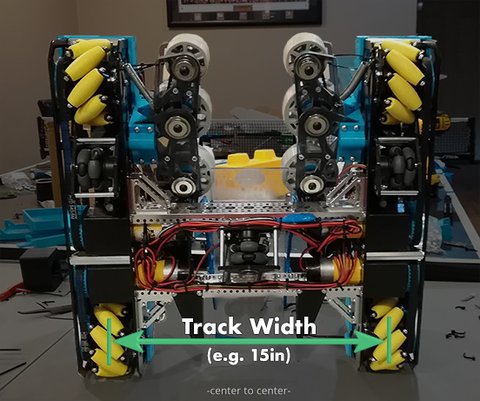
경로 폭이란 두 개의 평행한 바퀴의 중심 간 거리입니다. 하지만, 이 용어는 상황에 따라 두 가지로 사용됩니다.
DriveConstants.java에서의 경로 폭는 드라이브 트레인의 경로 폭를 의미합니다.LATERAL_DISTANCE와 동일합니다.현재는 로컬라이저를 다루지 않으므로, 이 페이지에서 언급되는 모든 “트랙 너비"는 드라이브 트레인의 트랙 너비를 의미합니다.
최대 각속도 측정
경로 폭 튜너를 실행하기 전에 로봇이 유지할 수 있는 최대 각속도를 측정해야 합니다. 각속도가 너무 높으면 튜너가 제대로 작동하지 않습니다.
MaxAngularVelocityTuner OpMode를 실행합니다. 이 튜너는 로봇을 최대 속도로 몇 초 동안 회전시킵니다.DriveConstants.java의 MAX_ANG_VEL 필드에 설정하세요.경로 폭 튜너 실행
TrackWidthTuner OpMode를 실행합니다.트랙 너비 값 설정
DriveConstants.java의 TRACK_WIDTH에 설정합니다.수동 튜닝
노트
DriveConstants.java의 MAX_ANG_VEL 값을 줄여보세요.