Title here
Summary here

현재 단계는 주행 피드포워드 조율 단계입니다.
피드포워드 컨트롤러를 정확히 튜닝하는 것은 경로를 따라 정확히 이동하기 위해 필수적입니다.
피드포워드 컨트롤러의 튜닝이 부정확하면 이후 과정에서 오류가 발생할 수 있습니다.
Roadrunner Quickstart에는 자동 튜너와 수동 튜너가 포함되어 있지만,
많은 사용자가 자동 튜너가 최적의 결과를 제공하지 않는다고 느낍니다.
특히 자동 튜너는 kA 값을 제대로 계산하지 못할 가능성이 큽니다.
하지만 자동 튜너를 실행해 보고 얻은 수치를 사용하는 것은 개인의 자유이며,
수동으로 값을 얻고자 할지라도, 자동 튜너로 수치를 얻고, 이후 수동으로 값을 조정하는 것을 추천합니다.
팁
Xbox 및 Logitech 게임패드에서 X 버튼을, PS4 듀얼쇼크에서 □ 버튼을 눌러 튜닝 프로세스를 일시 중지하고 운전자 제어 모드로 전환할 수 있습니다. Xbox 및 Logitech 게임패드에서 A 버튼을, PS4 듀얼쇼크에서 X 버튼을 눌러 다시 튜너에 제어권을 넘길 수 있습니다. 로봇이 경로를 벗어나면 운전자 제어 모드로 전환하여 로봇을 초기 위치로 되돌리십시오.
주의
튜닝 과정에서 로봇이 천천히 경로에서 벗어나는 것은 정상입니다. 이 문제는 이후에 헤딩 및 병진 PID 튜닝 과정에서 해결될 것입니다.
RC(Robot Controller)를 통해 ManualFeedforwardTuner OpMode를 실행합니다.
RC의 Wi-Fi 네트워크에 연결합니다. 네트워크 비밀번호는 Program and Manage 메뉴에서 확인할 수 있습니다.
RC로 핸드폰을 사용하는 경우 192.168.49.1:8080/dash, Control Hub의 경우 192.168.43.1:8080/dash로 이동합니다.
페이지는 아래와 비슷하게 표시될 것입니다:
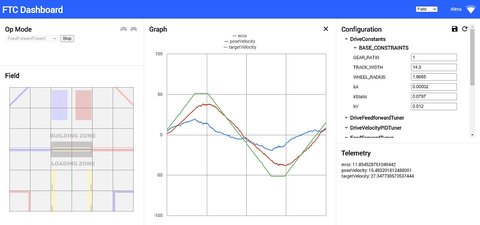
OpMode를 실행합니다. 프로그램을 시작하기 전에는 그래프가 나타나지 않습니다.
targetVelocity와 poseVelocity 체크박스를 선택하면 됩니다.대시보드에서 오른쪽에 있는 DriveConstants 드롭다운을 찾습니다. 드롭다운을 열고, kA, kV, kStatic 변수를 찾으십시오. 곧 이 변수를 조정하게 될 것입니다.
주의
이 단계는 중요합니다. 속도 그래프에 안정기가 없는 경우 kV가 잘못된 것입니다.
이는 이후 정확도 문제로 이어질 수 있습니다. 안정기가 그래프에 나타나도록 거리를 늘리십시오.
ManualFeedforwardTuner 드롭다운에서 DISTANCE 변수가 충분히 커서 targetVelocity 라인이 안정기를 가질 수 있도록 설정하십시오. 그래프가 삼각형 모양처럼 보일 경우, DISTANCE 값을 늘리십시오.
팁
거리가 충분하지 않은 경우, Drive Constants에서 `MAX_ACCEL` 값을 늘리거나 `MAX_VEL` 값을 줄일 수 있습니다. 단, 이는 궤적의 속도/가속도에 영향을 미칠 수 있으므로 주의하십시오.
OpMode를 실행하면 로봇이 지정된 거리만큼 앞뒤로 이동할 것입니다. 목표는 poseVelocity 라인이 targetVelocity 라인과 일치하도록 하는 것입니다.
추천 튜닝 과정:
kV를 초기 값으로 1 / 최대 속도로 설정하십시오. poseVelocity 라인이 targetVelocity 안정기 그래프의 상단에 닿아야 합니다. 그렇지 않으면 kV를 늘리십시오.
kA를 증가시켜 poseVelocity 라인의 기울기가 targetVelocity와 일치하도록 조정하십시오.
아래의 참고 자료를 확인하여 각 게인의 역할을 시각적으로 이해하십시오.
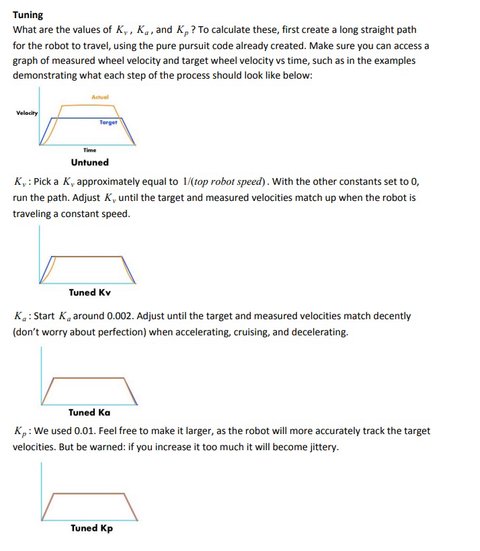
참고 자료는 FRC 팀 1712의 Adaptive Pure Pursuit 논문에서 발췌되었습니다.
이제 끝입니다! 적절히 튜닝된 피드포워드 컨트롤러의 예시는 아래를 참조하십시오.
대시보드에서 조정한 값은 반드시 DriveConstants.java 파일의 해당 변수에 복사해야 합니다. 대시보드에서의 조정은 임시적이며, OpMode를 다시 시작하면 초기화됩니다.
튜닝 시뮬레이터를 사용하여 각 수치가 동작에 미치는 영향을 확인하십시오.
주의: 그래프가 완벽할 필요는 없습니다. “충분히 괜찮은” 상태로 두십시오. 그래프를 완벽하게 만드는 데 무한한 시간을 소비할 수 있습니다. 또한, Rev Hub의 내부 모터 컨트롤러 특성상 감속 시 약간의 범프가 발생하며, 이를 제거하는 것은 불가능합니다.
튜닝된 피드포워드 컨트롤러의 예시 (팀 14320의 Deetz 제공):
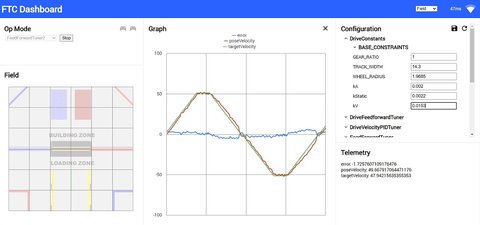
감속 시의 비대칭성이 보일 수 있습니다. 기본 모터 컨트롤 모델로는 완벽한 속도 제어를 달성할 수 없습니다. 감속 시 속도가 잘 추적되지 않는 것은 Rev Hub 모터 컨트롤러의 특성 때문일 가능성이 높습니다. 자세한 내용이나 이 문제에 대한 해결책이 있는 경우 FTC Discord에서 공유해 주세요.
팁
REV Hub의 출력 전압은 배터리 레벨이 떨어지면서 감소합니다.
따라서 피드포워드가 여러 경기에서 일관성을 보장하지 못할 수 있습니다.
Road Runner에는 명시적인 포즈 속도 폐쇄 루프 제어가 없습니다.
이를 보완하려면 병진 PID 컨트롤러의 kD 항을 추가하세요.
자세한 내용은 팔로워 PID 페이지에서 확인할 수 있습니다.
주의
REV Hub의 모터 컨트롤러는 감속을 제대로 처리하지 못합니다. 이로 인해 감속 단계에서 피드포워드를 정확히 튜닝하는 것이 불가능합니다. 이는 매번 10% 정도의 오버슈트를 초래할 수 있으며, 이는 충분히 예상된 결과입니다. 따라서 이 문제를 무시하고 다음 단계로 진행하십시오. 이 문제는 팔로워 PID 조율 과정에서 해결될 것입니다.
MaxVelocityTuner가 역방향으로 움직이는 경우:
poseVelocity가 반대로 움직이거나 targetVelocity를 따르지 않는 경우:
LocalizationTest를 실행해 실제 위치와 일치하는지 확인하십시오.StraightTest 또는 ManualFeedforwardTuning OpMode가 계속 과도하게 움직이고 DriveConstants.java 값을 조정해도 변하지 않는 경우:
DriveConstants.java에서 MAX_VEL 값을 낮춰 보십시오.기타 모터 방향 문제:
아래 링크로 들어가면 피드포워드 조율(Feedforward Tuning)을 시뮬레이션을 통해 연습해 볼 수 있습니다. 빠른 시일 내에 이 기능을 웹사이트의 기본 기능으로 추가하고자 합니다.