Title here
Summary here
경고
데드 휠을 사용하지 않는 경우, 이 섹션은 건너뛰세요.

현재 단계는 드라이브 상수 설정 단계입니다.
구성은 데드 휠이 2개인지 3개인지에 따라 달라집니다. 차이를 모르겠다면 FAQ를 참고하세요.
두 휠 구성을 사용하는 경우, 방향(heading) 소스로 자이로스코프를 사용합니다. 기본적으로 REV Hub의 내장 BNO055 자이로스코프가 사용됩니다.
다른 자이로스코프를 사용하려면, SampleMecanumDrive.java 파일에서 선언하고 getRawExternalHeading() 함수를 오버라이드하세요.
이 파일을 다운로드한 후, TeamCode 폴더에 저장하세요. 파일 정리를 위해 StandardTrackingWheelLocalizer.java 파일 근처에 저장하는 것을 추천합니다.
다운로드한 TwoWheelTrackingLocalizer.java 파일을 열어 수정하세요.
/* TwoWheelTrackingLocalizer.java 파일의 37-39번째 줄 */
public static double TICKS_PER_REV = 0;
public static double WHEEL_RADIUS = 2; // 인치 단위
public static double GEAR_RATIO = 1; // 출력(바퀴 속도) / 입력(엔코더 속도)TICKS_PER_REV: 엔코더가 한 바퀴 회전할 때 계산하는 “틱” 수입니다. 엔코더 사양은 제조사 웹사이트에서 확인하세요. Counts Per Revolution 또는 CPR 항목을 참고하세요. REV Through Bore Encoder의 경우 TICKS_PER_REV 값은 8192입니다.WHEEL_RADIUS: 데드 바퀴의 반지름입니다. 지름이 아닌 반지름 값을 입력하세요.GEAR_RATIO: 출력(바퀴 속도)과 입력(엔코더 속도)의 비율입니다. 엔코더에 기어비를 설정하지 않았다면 1로 설정하세요./* TwoWheelTrackingLocalizer.java 파일의 41-45번째 줄 */
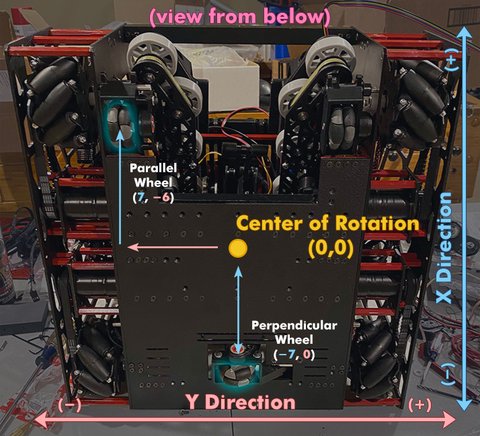
public static double PARALLEL_X = 0; // 수평 X, X는 전후 방향
public static double PARALLEL_Y = 0; // 수평 Y, Y는 좌우 방향
public static double PERPENDICULAR_X = 0; // 수직 X, X는 전후 방향
public static double PERPENDICULAR_Y = 0; // 수직 Y, Y는 좌우 방향수직 및 수평 바퀴의 X/Y 좌표를 입력하세요. X축은 전후 방향, Y축은 좌우 방향입니다. 이는 로봇 공학 및 항공 분야에서 일반적인 표준입니다.
경우에 따라 Encoder.setDirection(Encoder.Direction.REVERSE)를 사용해 엔코더의 방향을 반전시켜야 합니다.
예시:
/* TwoWheelTrackingLocalizer.java 파일의 60-63줄 */
parallelEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "parallelEncoder"));
perpendicularEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "perpendicularEncoder"));
// TODO: Encoder.setDirection(Encoder.Direction.REVERSE)로 엔코더를 반대로 설정하세요.
// 예시) 수직 엔코더의 방향을 반대로 설정해야 하는 경우:
perpendicularEncoder.setDirection(Encoder.Direction.REVERSE);경고
Rev Through Bore 엔코더를 사용하는 경우 아래 내용을 반드시 참조하세요.
Rev Through Bore 엔코더 주의사항
REV Through Bore 엔코더를 사용하는 경우, 속도가 32767 cps (counts per second)를 초과하면
정수 오버플로우가 발생할 수 있습니다. 이는 REV Hub 펌웨어가 속도 데이터를 16비트 정수로 전송하기 때문입니다.
이를 해결하려면 getRawVelocity() 대신 getCorrectedVelocity()를 사용하세요.
/* TwoWheelTrackingLocalizer.java 파일의 86-95줄 */
public List<Double> getWheelVelocities() {
//TODO : 인코더 속도가 초당 32767 카운트를 초과할 경우, Encoder.getRawVelocity()를 Encoder.getCorrectedVelocity()로 변경하여 보정 메서드를 활성화하세요.
return Arrays.asList(
encoderTicksToInches(parallelEncoder.getCorrectedVelocity()),
encoderTicksToInches(perpendicularEncoder.getCorrectedVelocity())
);
}/* TwoWheelTrackingLocalizer.java 파일의 60-61줄 */
parallelEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "parallelEncoder"));
perpendicularEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "perpendicularEncoder"));여기서 사용한 ID가 REV Hub 설정의 ID와 일치하는지 확인하세요.
/* SampleMecanumDrive.java 파일의 134-137줄 */
imu = hardwareMap.get(BNO055IMU.class, "imu");
BNO055IMU.Parameters parameters = new BNO055IMU.Parameters();
parameters.angleUnit = BNO055IMU.AngleUnit.RADIANS;
imu.initialize(parameters);IMU가 SampleMecanumDrive.java 클래스에서 초기화되어 있는지 확인하세요. Quickstart를 다운로드했으며 REV Hub IMU를 사용 중이라면 변경할 필요가 없습니다. 외부 자이로를 사용하는 경우, 이 섹션을 수정하세요.
SampleMecanumDrive.java 파일 하단의 getExternalHeadingVelocity 함수에서 함수가 IMU가 회전하는 축을 구성에 맞게 반환하는지 확인하세요.
파일에 제공된 ASCII 다이어그램을 참조하여 어떤 축을 선택해야 하는지 확인할 수 있습니다.
REV Hub가 평평하게 장착되어 있으면 로봇은 Z축을 중심으로 회전합니다.
모터 포트가 위 또는 아래를 향하고 있는 쪽에 있으면 로봇은 Y축을 중심으로 회전합니다.
서보 포트가 위 또는 아래를 향하고 있으면 로봇이 X축을 중심으로 회전합니다.
/* SampleMecanumDrive.java 파일의 399-419줄 */
@Override
public Double getExternalHeadingVelocity() {
// TODO: 설정에 맞게 이 값을 변경해야 합니다
// | Z 축
// |
// (모터 포트 측면) | / X 축
// ____|__/____
// Y 축 / * | / /| (IO 측면)
// _________ /______|/ // I2C
// /___________ // 디지털
// |____________|/ 아날로그
//
// (서보 포트 측면)
//
// 양의 X 축은 USB 포트가 있는 방향을 가리킵니다.
//
// 축 회전 속도를 필요에 따라 조정하세요.
// REV Hub/Control Hub가 평평한 표면에 놓여 있다고 가정하면
// 기본 설정은 Z 축을 기준으로 회전합니다.
return (double) imu.getAngularVelocity().zRotationRate;
}로컬라이저 구성을 완료한 후, 다시 SampleMecanumDrive.java 파일로 돌아갑니다.
약 168번째 줄을 확인하세요. “// TODO: if desired, use setLocalizer() to change the localization method“라는 주석을 찾을 수 있을 것입니다.
이 주석 아래에 다음 줄을 추가하세요:
/* 약 168번째 줄 - SampleMecanumDrive.java */
// TODO: if desired, use setLocalizer() to change the localization method
// for instance, setLocalizer(new ThreeTrackingWheelLocalizer(...));
setLocalizer(new TwoWheelTrackingLocalizer(hardwareMap, this));이렇게 로컬라이저을 완료할 수 있습니다.
세 바퀴 오도메트리 설정을 선택한 경우, 헤딩(heading)의 소스로 두 개의 평행 바퀴를 사용하게 됩니다.
StandardTrackingWheelLocalizer.java 파일을 엽니다.
/* StandardTrackingWheelLocalizer.java - 30~32번째 줄 */
public static double TICKS_PER_REV = 0;
public static double WHEEL_RADIUS = 2; // 인치 단위
public static double GEAR_RATIO = 1; // 출력(바퀴) 속도 / 입력(엔코더) 속도TICKS_PER_REV: 인코더가 한 바퀴 회전 시 카운트하는 “틱(tick)“의 개수입니다. 인코더 사양은 제조사의 사이트에서 확인할 수 있습니다. Counts Per Revolution(CPR) 값을 찾으세요. 예를 들어, REV Through Bore Encoder의 경우 TICKS_PER_REV는 8192입니다.WHEEL_RADIUS: 데드 휠의 반지름입니다. 반드시 반지름(radius)을 사용하고 직경(diameter)을 사용하지 않도록 주의하세요.GEAR_RATIO: 출력(바퀴) 속도와 입력(엔코더) 속도의 비율입니다. 엔코더에 기어를 사용하지 않는 경우 1로 유지하세요./* StandardTrackingWheelLocalizer.java - 34~35번째 줄 */
public static double LATERAL_DISTANCE = 10; // 인치 단위, 좌우 바퀴 간 거리
public static double FORWARD_OFFSET = 4; // 인치 단위, 중심 축에서 전면 바퀴까지의 오프셋 거리LATERAL_DISTANCE: 좌우 바퀴 간의 거리입니다.FORWARD_OFFSET: 회전 중심에서 중앙 휠까지의 거리입니다.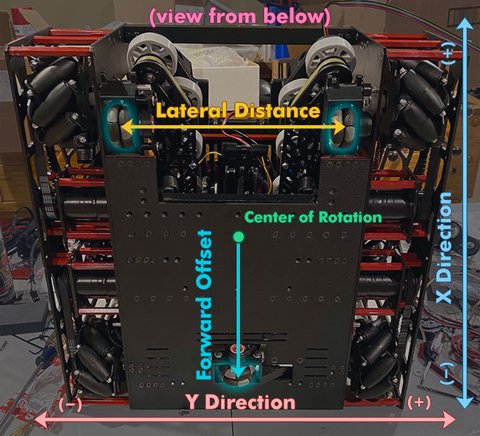
경우에 따라 Encoder.setDirection(Encoder.Direction.REVERSE)를 사용해 엔코더의 방향을 반전시켜야 합니다.
예시:
/* StandardTrackingWheelLocalizer.java - 46~63번째 줄 */
leftEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "leftEncoder"));
rightEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "rightEncoder"));
frontEncoder = new Encoder(hardwareMap.get(DcMotorEx.class, "frontEncoder"));
// TODO: 인코더 방향을 바꿀 때는 "Encoder.setDirection(Encoder.Direction.REVERSE)"를 사용.
// 예시) 중앙 인코더를 반전시켜야 할 경우:
frontEncoder.setDirection(Encoder.Direction.REVERSE);이 코드를 통해 엔코더의 방향을 올바르게 설정할 수 있습니다.
경고
Rev Through Bore 엔코더를 사용하는 경우 아래 내용을 반드시 참조하세요.
Rev Through Bore 엔코더 주의사항
REV Through Bore 엔코더를 사용하는 경우, 속도가 32767 cps (counts per second)를 초과하면
정수 오버플로우가 발생할 수 있습니다. 이는 REV Hub 펌웨어가 속도 데이터를 16비트 정수로 전송하기 때문입니다.
이를 해결하려면 getRawVelocity() 대신 getCorrectedVelocity()를 사용하세요.
/* TwoWheelTrackingLocalizer.java 파일의 86-95줄 */
public List<Double> getWheelVelocities() {
//TODO : 인코더 속도가 초당 32767 카운트를 초과할 경우, Encoder.getRawVelocity()를 Encoder.getCorrectedVelocity()로 변경하여 보정 메서드를 활성화하세요.
return Arrays.asList(
encoderTicksToInches(parallelEncoder.getCorrectedVelocity()),
encoderTicksToInches(perpendicularEncoder.getCorrectedVelocity())
);
}로컬라이저 구성을 완료했다면, SampleMecanumDrive.java 파일로 돌아갑니다.
대략 131번째 줄에서 “// TODO: if desired, use setLocalizer() to change the localization method“라는 주석을 찾을 수 있을 겁니다.
이 주석 아래에 다음 줄을 추가하세요:
/* 약 131번째 줄 - SampleMecanumDrive.java */
// TODO: if desired, use setLocalizer() to change the localization method
// for instance, setLocalizer(new ThreeTrackingWheelLocalizer(...));
setLocalizer(new StandardTrackingWheelLocalizer(hardwareMap));이렇게 로컬라이저 설정을 완료할 수 있습니다.
세 바퀴 오도메트리(Three-Wheel Odometry) 방식에서는 IMU가 필요하지 않습니다.
따라서 SampleMecanumDrive에서 IMU 초기화를 제거하는 것이 좋습니다.
IMU 초기화는 운영 모드(opmode) 초기화 시간을 2~3초 늘릴 수 있으며, 불필요한 시간이 소요될 수 있습니다.
SampleMecanumDrive.java 파일에서 다음 코드를 찾아 삭제하세요:
/* 약 134~137번째 줄 - SampleMecanumDrive.java */
// TODO: adjust the names of the following hardware devices to match your configuration
imu = hardwareMap.get(BNO055IMU.class, "imu");
BNO055IMU.Parameters parameters = new BNO055IMU.Parameters();
parameters.angleUnit = BNO055IMU.AngleUnit.RADIANS;
imu.initialize(parameters);그리고 안전을 위해, 아래 메서드들의 반환값을 0으로 변경하세요:
/* 약 393~396번째 줄 - SampleMecanumDrive.java */
@Override
public double getRawExternalHeading() {
return 0;
}
@Override
public Double getExternalHeadingVelocity() {
return 0.0;
}데드 휠(Dead Wheel)을 사용한 오도메트리의 튜닝은 매우 중요한 과정입니다. 이 과정은 Road Runner뿐만 아니라 FTCLib 또는 직접 개발한 경로 추적 시스템에서도 중요한 역할을 합니다. 이것의 목표는 로컬라이제이션(Localization)의 정확도를 최대화하는 것입니다.
팁
이 과정이 모든 사용자에게 필수는 아니지만, 적용하면 약 1% 더 정확한 위치 추적이 가능합니다. 예를 들어, 100인치 이동 시 1% 오차는 1인치 차이를 줄이는 데 도움이 됩니다. FTC Skystone 시즌(2019-2020) 동안, 4~5개의 돌을 옮기는 자율 주행 루틴은 100인치 이상을 이동하며, 이런 차이가 큰 영향을 미칠 수 있었습니다.
노트
아래의 과정이 적용된 전체 코드는 예제 코드를 참고하세요.
TwoWheelTrackingLocalizer.java 파일을 엽니다./* 약 46~47번째 줄 - TwoWheelTrackingLocalizer.java */
public static double X_MULTIPLIER = 1; // X 방향 보정 계수
public static double Y_MULTIPLIER = 1; // Y 방향 보정 계수getWheelPositions()와 getWheelVelocities() 함수에 보정 계수를 추가합니다:/* 약 77~97번째 줄 - TwoWheelTrackingLocalizer.java */
@NonNull
@Override
public List<Double> getWheelPositions() {
return Arrays.asList(
encoderTicksToInches(parallelEncoder.getCurrentPosition()) * X_MULTIPLIER,
encoderTicksToInches(perpendicularEncoder.getCurrentPosition()) * Y_MULTIPLIER
);
}
@NonNull
@Override
public List<Double> getWheelVelocities() {
// TODO: 인코더 속도가 초당 32767 카운트를 초과할 경우, Encoder.getRawVelocity()를
// Encoder.getCorrectedVelocity()로 변경하여 보정 메서드를 활성화하세요.
return Arrays.asList(
encoderTicksToInches(parallelEncoder.getRawVelocity()) * X_MULTIPLIER,
encoderTicksToInches(perpendicularEncoder.getRawVelocity()) * Y_MULTIPLIER
);
}참고: X_MULTIPLIER는 수평 엔코더에 작용하는 값입니다. 왜냐하면 x는 로컬 좌표계를 향해 있기 때문입니다 (로봇 공학/항공/등 상황에서 흔히 사용됩니다).
LocalizationTest opmode를 실행합니다. 단, 컨트롤러는 사용하면 안 됩니다.X_MULTIPLIER = 실제 이동 거리 / 텔레메트리 이동 거리X_MULTIPLIER는 1.01123596입니다.LocalizationTest opmode를 실행합니다.192.168.49.1:8080/dash 또는 Control Hub에서 192.168.43.1:8080/dash로 접속합니다.문제가 발생하면 문제 해결(Troubleshooting) 섹션을 참고하세요.
데드 휠의 조율은 매우 중요합니다. 이는 Road Runner뿐만 아니라 FTCLib 또는 직접 제작한 경로 추적 시스템에도 적용됩니다. 정확한 조율은 위치 및 거리 측정에서 발생하는 오류를 최소화하여 자율 주행 시 성능을 크게 향상시킬 수 있습니다.
팁
이 단계는 선택 사항이지만 로컬라이제이션 정확도를 약 1% 정도 향상시킬 수 있습니다. 1%가 별것 아닌 것처럼 보일 수 있지만, 100인치 이상의 주행 시 약 1인치 차이를 만들 수 있습니다. 예를 들어 FTC Skystone(2019-2020) 시즌에서 4~5개의 스톤을 운반하는 자율 주행은 100인치 이상 이동해야 했으며, 1인치의 추가 정확도가 큰 차이를 만들었을 수 있습니다.
노트
아래의 과정이 적용된 전체 코드는 예제 코드를 참고하세요.
StandardTrackingWheelLocalizer.java 파일 열기
해당 파일에서 아래 두 변수를 클래스에 선언합니다:
/* StandardTrackingWheelLocalizer.java 파일의 약 37~38줄 */
public static double X_MULTIPLIER = 1; // X 방향 보정 계수
public static double Y_MULTIPLIER = 1; // Y 방향 보정 계수보정 계수를 getWheelPositions() 및 getWheelVelocities() 함수에 추가
아래와 같이 코드를 수정합니다:
/* StandardTrackingWheelLocalizer.java 파일 약 67~103줄 */
@NonNull
@Override
public List<Double> getWheelPositions() {
return Arrays.asList(
encoderTicksToInches(leftEncoder.getCurrentPosition()) * X_MULTIPLIER,
encoderTicksToInches(rightEncoder.getCurrentPosition()) * X_MULTIPLIER,
encoderTicksToInches(frontEncoder.getCurrentPosition()) * Y_MULTIPLIER
);
}
@NonNull
@Override
public List<Double> getWheelVelocities() {
return Arrays.asList(
encoderTicksToInches(leftEncoder.getCorrectedVelocity()) * X_MULTIPLIER,
encoderTicksToInches(rightEncoder.getCorrectedVelocity()) * X_MULTIPLIER,
encoderTicksToInches(frontEncoder.getCorrectedVelocity()) * Y_MULTIPLIER
);
}참고: X 방향 보정 계수는 X 좌표가 로컬 좌표계에서 앞쪽으로 향하기 때문에 leftEncoder와rightEncoder에 적용됩니다.
물리적인 튜닝 과정을 진행합니다:
LocalizationTest opmode를 실행합니다. 단, 컨트롤러는 사용하면 안 됩니다.보정 계수를 계산합니다.
보정 계수는 실제 이동 거리 / 텔레메트리(Telemetry) 이동 거리로 계산됩니다.
예를 들어 텔레메트리가 89인치를 표시하고 실제 측정값이 90인치라면, 보정 계수는 1.01123596이 됩니다.
이 과정을 X방향(앞으로 이동)으로 3번 반복해 평균값을 구한 후 X_MULTIPLIER에 설정합니다.
Y방향(옆으로 이동)에서도 동일한 과정을 반복한 후, 계산된 Y 방향 계수를 Y_MULTIPLIER에 설정합니다.
측면 거리는 로컬라이제이션에서 방향 계산에 중요한 요소입니다. 이 값을 잘못 설정하면 방향 오차가 누적되어 로컬라이제이션 성능이 크게 저하됩니다.
StandardTrackingWheelLocalizer.java 파일의 LATERAL_DISTANCE 값 확인을 확인합니다.
해당 값을 실제 측정한 거리로 설정합니다. 이후 튜닝 과정에서 조율될 예정이니 정확하지 않더라도 괜찮습니다.
로봇의 특정 지점(테이프 표시 등)을 기준으로 360° 회전 전후의 위치를 확인할 수 있도록 준비합니다.
TrackingWheelLateralDistanceTuner OpMode를 실행합니다.
대시보드를 사용하면 로봇의 상태를 시각적으로 확인할 수 있습니다. RC의 WiFi에 연결한 뒤, 브라우저에서 192.168.49.1:8080/dash (RC 전화 사용 시) 또는 192.168.43.1:8080/dash (Control Hub 사용 시)로 접속하세요.
OpMode를 실행한 후 게임패드의 오른쪽 조이스틱을 사용해 로봇을 반시계 방향으로 회전시킵니다.
로봇을 10회 반시계 방향으로 회전시키고 완료되면 게임패드의 Y 버튼을 눌러 튜닝을 종료합니다. 이후 시작 지점과 동일하게 정렬되었는지 확인합니다.
출력된 LATERAL_DISTANCE 값을 StandardTrackingWheelLocalizer.java에 입력합니다.
만약 값이 부정확하다면 직접 조정하면서 반복 테스트합니다.