Title here
Summary here
Road Runner와 Pure Pursuit는 자주 비교되지만, 본질적으로 매우 다른 도구입니다.
특히, Pure Pursuit는 가속도 제어가 없기 때문에 데드 휠 오도메트리 설치가 필수입니다. 또한, FTC 로봇 대부분이 홀로노믹(메카넘) 드라이브를 사용하기 때문에 Pure Pursuit는 잘 맞지 않는 경우가 많습니다.
데드 휠과 오도메트리는 종종 같은 의미로 사용되지만, 사실 차이가 있습니다.
데드 휠을 메카넘 휠에 비해 미끄러지는 정도가 작기에, 데드 휠을 사용할 경우 오차를 줄여 정확도를 크게 향상시킬 수 있습니다.
요약: 세 바퀴 구성은 루프 시간을 단축하여 드리프트를 줄이고 더 높은 정확도를 제공합니다.
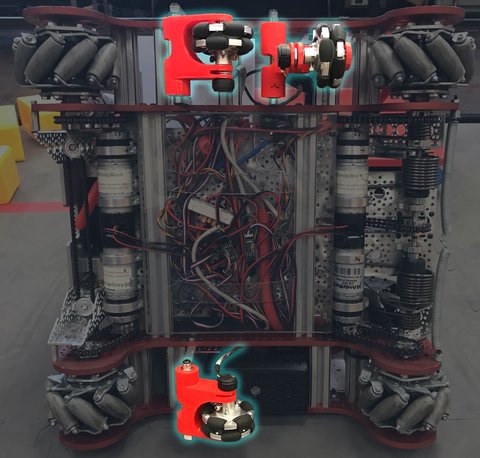
위에서 설명했듯이 표준 데드 휠(dead wheel) 구성은 여러 개의 무동력 옴니 휠(omni wheel)을 인코더와 연결하여 사용하는 방식입니다. 그러나 두 개 또는 세 개의 옴니 휠을 선택적으로 사용할 수 있습니다.
두 바퀴 구성은 서로 수직으로 배치된 두 개의 데드 휠을 사용합니다.
세 바퀴 구성은 두 개의 평행한 휠과 하나의 수직 휠을 사용합니다.
추가 모듈 제작은 번거롭고, 비용이 약 30% 증가하기에 비효율적이라고 생각할 수 있지만, 현재로써는 세 바퀴 구성은 가장 정확한 옵션으로 평가받고 있습니다.
이유:
Rev Expansion/Control Hub는 느린 I2C 구현을 사용하여 I2C 호출당 약 7ms의 지연 시간이 발생합니다.
반면, 세 바퀴 구성에서는 두 평행 휠을 통해 헤딩을 계산하므로 7ms I2C 호출이 필요하지 않습니다.
향후 출시될 Control Hub는 Expansion Hub보다 3배 빠른 I/O 속도를 제공하므로, 두 구성 간의 차이가 줄어들 가능성이 있습니다.
데드 휠 모듈 제작에는 여러 세부 사항과 선택지가 존재합니다. 현재 기준으로 데드 휠 모듈 제작에 대한 자료는 많지 않습니다.
모듈당 비용은 약 $30 이상이며, 세 바퀴 구성은 총 $100 이상의 비용이 들 수 있습니다.
추가 정보를 원한다면 FTC Discord를 방문하세요.
추천 오픈 소스 데드 휠 설계 자료:
https://openodometry.weebly.com/
스플라인 경로는 스플라인 곡선을 사용해 생성된 경로입니다.
Road Runner에서는 스플라인 경로를 자주 사용하며, 직선 경로를 단순히 연결하는 것보다 훨씬 부드러운 움직임을 제공합니다.
Road Runner는 기본적으로 인치 단위를 사용합니다.
더 자세한 정보가 필요하다면 FTC Discord를 방문해 보세요! 😊